
燃料消費量を削減し、ミッション期間を延長するために、難しいナビゲーションに変更されました
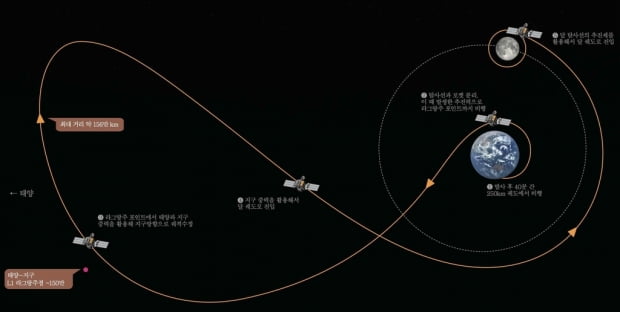
韓国初の月探査機「だぬり」(KPLO、韓国パスファインダー月探査機)は、蝶の形をした軌道を描き、月に向かって向きを変えます。
ダヌリは直接月に行くのではなく、太陽の側から離れた宇宙に行き、蝶の形で地球に戻り、月のような軌道に入り、月に近づいて月を周回します。
地球から月までの距離は約38万kmですが、打ち上げ後、ダヌリは月に近づく前にターゲットの軌道に入る前に最大156万km移動します。
このような軌道を描いて月軌道に入る方法を「弾道月周回軌道(BLT)」といいます。
過去の月探査の中で、1990年の日本の「飛天」と2011年の米国の「グレイル」は、これらの月への軌跡をたどっています。
太陽に向かって発射されたダヌリローバーは、ロケットから離れるときに受けた運動量のおかげで太陽と地球の重力が平衡状態にあるラグランジュ点L1(地球から150万km)の近くを飛行します。
この時点で、太陽と地球の重力を利用して地球に向かって回転し、次に地球の重力によって引き戻されて加速して戻ります。
地球に近づくと、地球を周回する月に遭遇し、5回の減速操作を経て、月の100km上空の軌道に入ります。
BLT軌道では、プローブは天体の重力を利用して推進力と運動量を実現するため、燃料消費を最小限に抑え、ミッションを長時間実行できます。
ただし、自走式エンジンを使用した場合に比べて制御が難しく、1度動かしても600kmの誤差が発生する可能性があるため、正確で完璧な航法技術が求められます。
また、プローブが離れた場所に入るため、地球とプローブの間の通信が困難になる可能性があります。
通常、距離が2倍になると、1時間あたりの通信容量は4分の1に減少します。
開発の初期段階で、Aviation Co.、Ltd.は、BLTよりも概念的にはるかに単純な「位相シフト」法で月面プローブを操作するというアイデアを思いつきました。
これは、地球を約1か月間、長い楕円軌道で数回周回した後、月周回軌道に入る方法です。
日本とインドも、宇宙船が軌道に乗っている間に衛星の主要コンポーネントが正常に機能しているかどうかを確認する十分な時間があったため、最初の月面ミッションにこの方法を採用しました。
![[달탐사선 다누리] ②遠くに向きを変えて蝶の形をした月に行く理由](https://img.hankyung.com/photo/202207/PYH2022041003290001700_P4.jpg)
しかし、月面探査機の設計過程で、月面探査機の質量は当初の目標である550kgから678kgに増加しました。
その結果、月探査機の設計、組み立て、打ち上げに協力していた米国航空宇宙局(NASA)は、私たちの研究チームにBLT軌道を提案しました。
私たちの月探査機は、NASAが「アルテミス」を実行するために開発したペイロードである「ShadowCam」を搭載しています。
空軍株式会社はこれを受け入れ、NASAによって改訂されたBLT軌道を設計しました。
大韓航空協会が非常に正確で正確なナビゲーションを必要とするBLT方式を適切に実装できるように、NASAは、ナビゲーション操作に協力しながらダヌリを継続的に追跡できる「ディープスペースネットワーク(DSN)」アンテナもサポートしています。
ダヌリは、韓国の京畿道驪州に設置された地上深宇宙アンテナと、スペインのマドリッドとロサンゼルスのゴールドストーンにある地上深宇宙アンテナと交互に通信します。
緊急時には、オーストラリアのキャンベラにあるNASAのアンテナがバックアップとして使用されます。
ハングキョンは月周回衛星ミッションのオペレーションセンターを運営しており、地球の深宇宙アンテナとNASAの宇宙ネットワークを接続して、ダヌリコマンドの送信、ステータス情報の受信、軌道の決定を行う予定です。
ダヌリ燃料が現在の任務期間(1年)が終了する2023年12月まで利用可能であると決定された場合、研究者は運用期間を延長することを計画している。
ミッションの最後に、月面と衝突して衝突直前の画像を取得する方法と、一定の高度を維持するために凍結軌道に変換する方法の2つの方法について説明します。
すべての最終決定は、指定された任務期間の終了の6か月前の2023年7月に行われます。
/ユンハプニュース

「謝罪のないソーシャルメディアの第一人者。一般の読者。不治のポップカルチャーのスペシャリスト。」

![[뉴스 동서남북]「日朝首脳会談は9月までに?」](https://gdb.voanews.com/091e0000-0a00-0242-221b-08dabdaf7583_w1200_r1.jpg)
![[카드뉴스] 日本の地域ナンバープレート政策 ブランドナンバープレート < トップニュース < 掲示板ニュース < 価値消費ニュース < 記事本文](https://cdn.consumerwide.com/news/photo/202211/49122_58824_823.jpg)

![[뉴스 인사이드] 日本「拉致被害者12人の送還に全力を尽くす」](https://gdb.voanews.com/CC1140EE-0987-4550-BD66-4475A17E5A58_cx0_cy1_cw0_w1200_r1.jpg)
